Несмотря на внешнюю простоту, инкрементальные энкодеры являются сложными устройствами, требующими точного расчета, высокоточной механической сборки и корректной интерпретации выходных сигналов.
Принцип действия
Основой работы инкрементального энкодера является генерация определенного числа импульсов за один оборот вала. Эти импульсы получаются за счет оптического, магнитного или емкостного способа считывания изменений в положении меток, нанесённых на диск, связанный с валом. Чаще всего применяется оптический принцип с фотодатчиками и светодиодами. В стандартной конфигурации присутствуют два сигнальных канала A и B, смещённые по фазе на 90 градусов, что позволяет определять направление вращения. Третий канал, Z (или индексный импульс), генерируется один раз за оборот и используется для нулевой привязки.
Электрические характеристики и сигнализация
Импульсы, формируемые на выходе энкодера, могут иметь различную электрическую форму: TTL (5 В), HTL (10…30 В), или дифференциальную (RS-422). Для минимизации помех и потерь при передаче данных на значительные расстояния применяются дифференциальные линии с использованием драйверов типа line-driver. Частота следования импульсов зависит от скорости вращения вала и разрешения энкодера (числа импульсов на оборот, CPR или PPR).
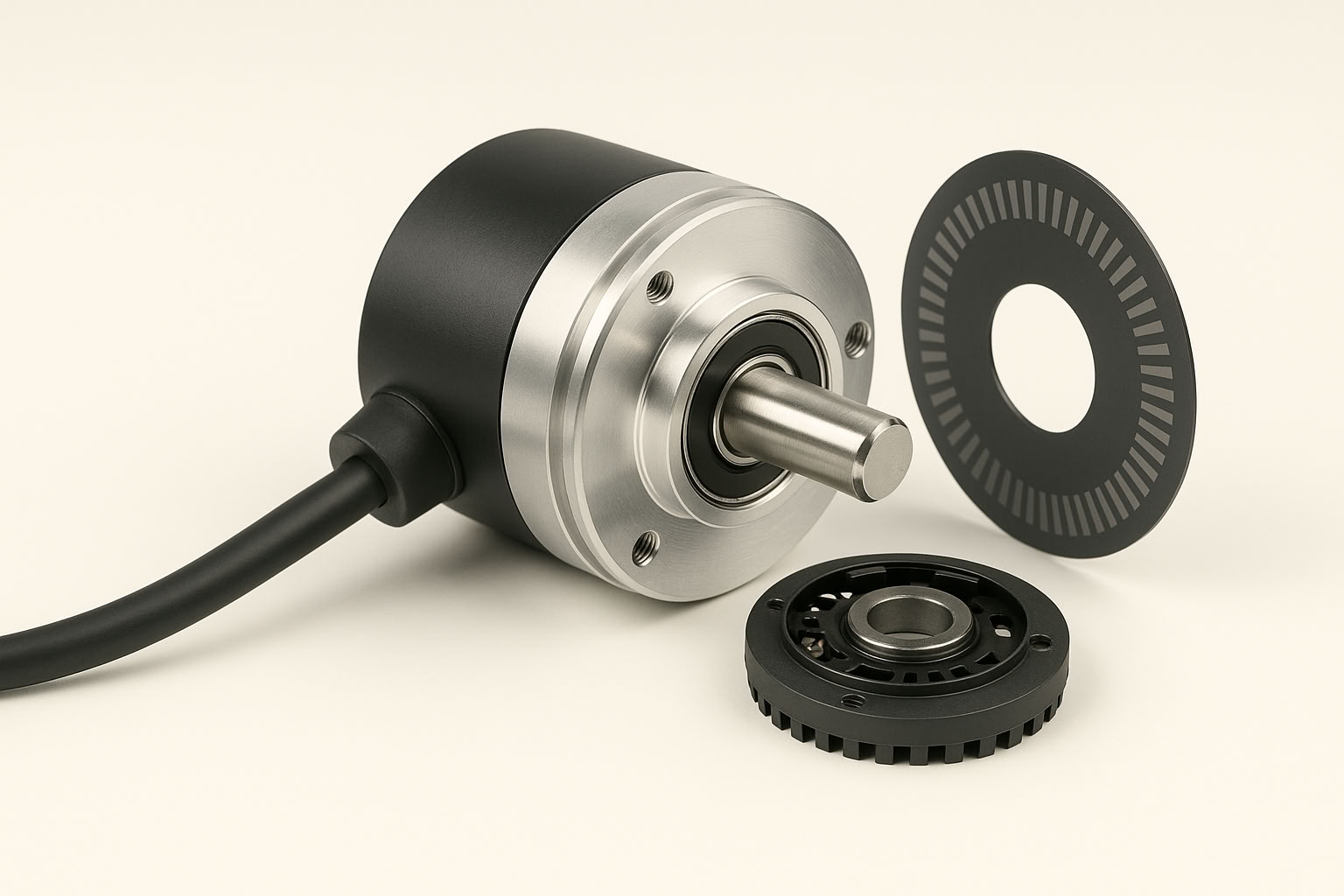
Конструктивные особенности
Инкрементальные энкодеры бывают как с осевым, так и с полым (или сквозным) валом. Они могут быть предназначены для прямой установки на вал двигателя или через гибкую муфту. Корпуса обычно изготавливаются из алюминия или нержавеющей стали, степень защиты соответствует стандартам IP50-IP67. Крепление может быть с помощью фланца, кронштейна или посредством пружинных элементов, компенсирующих осевое смещение и вибрации.
Важной характеристикой является тип подшипников и максимальное допустимое радиальное и осевое усилие на вал. Для применения в высокоскоростных или агрессивных средах используются герметизированные и усиленные подшипниковые узлы.
Преимущества и ограничения
К преимуществам инкрементальных энкодеров относятся:
- Высокое разрешение (до 100 000 имп/об и выше);
- Простота реализации интерфейсов в системах управления;
- Быстрая реакция на изменение положения;
- Универсальность в применении с различными приводами.
Однако их основным ограничением является невозможность определения абсолютного положения без предварительной калибровки или внешнего запоминания позиции при отключении питания.
Сравнение с абсолютными энкодерами
| Характеристика | Инкрементальный энкодер | Абсолютный энкодер |
|---|---|---|
| Тип выходных данных | Импульсный | Кодированное положение |
| Наличие индексного импульса | Да | Не требуется |
| Сохранение позиции при сбое | Нет | Да |
| Сложность сигнального тракта | Ниже | Выше |
| Необходимость в нулевой метке | Да | Нет |
| Применение | Универсальное | Критичные по положению системы |
Интерфейсы и совместимость
Интерфейсный уровень инкрементальных энкодеров включает не только физические параметры сигнала, но и форматы разъёмов. Наиболее распространённые: M12 (4-8 контактов), Sub-D (9 или 15 pin), а также кабельный вывод. При проектировании систем важно учитывать не только тип интерфейса, но и его совместимость с входами ПЛК, частотных преобразователей или специализированных контроллеров движения.
Существует понятие «электрической совместимости»: логические уровни сигнала должны соответствовать спецификациям приёмного устройства. Например, HTL-сигнал не может быть напрямую подключён ко входу, поддерживающему только TTL, без использования адаптера.
Расчёт разрешения и частоты
Число импульсов на оборот (CPR) выбирается исходя из требуемой точности позиционирования. Частота сигнала на выходе определяется по формуле:
f = (CPR × n) / 60,
где f — частота импульсов в Гц, CPR — число импульсов на оборот, n — скорость вращения в об/мин.
Это значение критично при выборе входных частот для интерфейса считывания и определяет требуемую полосу пропускания сигнального тракта.
Типовые области применения
Инкрементальные энкодеры применяются в:
- Сервоприводах и частотно-регулируемых приводах;
- Роботизированных манипуляторах и координатных столах;
- Конвейерных системах и сортировочных линиях;
- Металлообрабатывающих и деревообрабатывающих станках;
- Системах позиционирования и обратной связи.
Для специфических задач (вакуумные установки, стерильные среды, взрывоопасные зоны) применяются специализированные исполнения с соответствующими сертификатами.
Рекомендации по монтажу и эксплуатации
Для обеспечения надёжности работы необходимо:
- Использовать экранированные кабели;
- Минимизировать длину линии между энкодером и контроллером;
- Избегать механических перегрузок на вал;
- Обеспечивать термостабильность и герметичность места установки;
- Проводить регулярную калибровку и проверку целостности сигнального кабеля.